17B06E Macropad (Von Simon99de)
English version of the instructions can be found on GitHub.
Es handelt sich um einen einfachen 4x4 (+1) Numpad mit 6 Drehgebern, 4x4 RGB-LEDs, OLED-Display und Hot-Swap-Tasten.
Sie können alle 6 Encoder und 17 Tasten nach Belieben anpassen. Es unterstützt auch mehrere Ebenen (/Seiten), was bedeutet, dass eine einzelne Taste viel mehr leisten kann. (Deshalb hat die Tastatur 17 statt 16 Tasten.)
Für mich war es ein Upgrade vom Dumbpad v3.x.
Es kann eine Alternative zu verschiedenen Tastaturen wie Streamdeck+, Loupdeck Live usw. sein, wenn Sie den Bildschirm hinter den Tasten nicht benötigen. Darüber hinaus benötigt die Macropad-Tastatur keine Hintergrundsoftware, um zu funktionieren, was eine erhöhte Kompatibilität bedeutet.
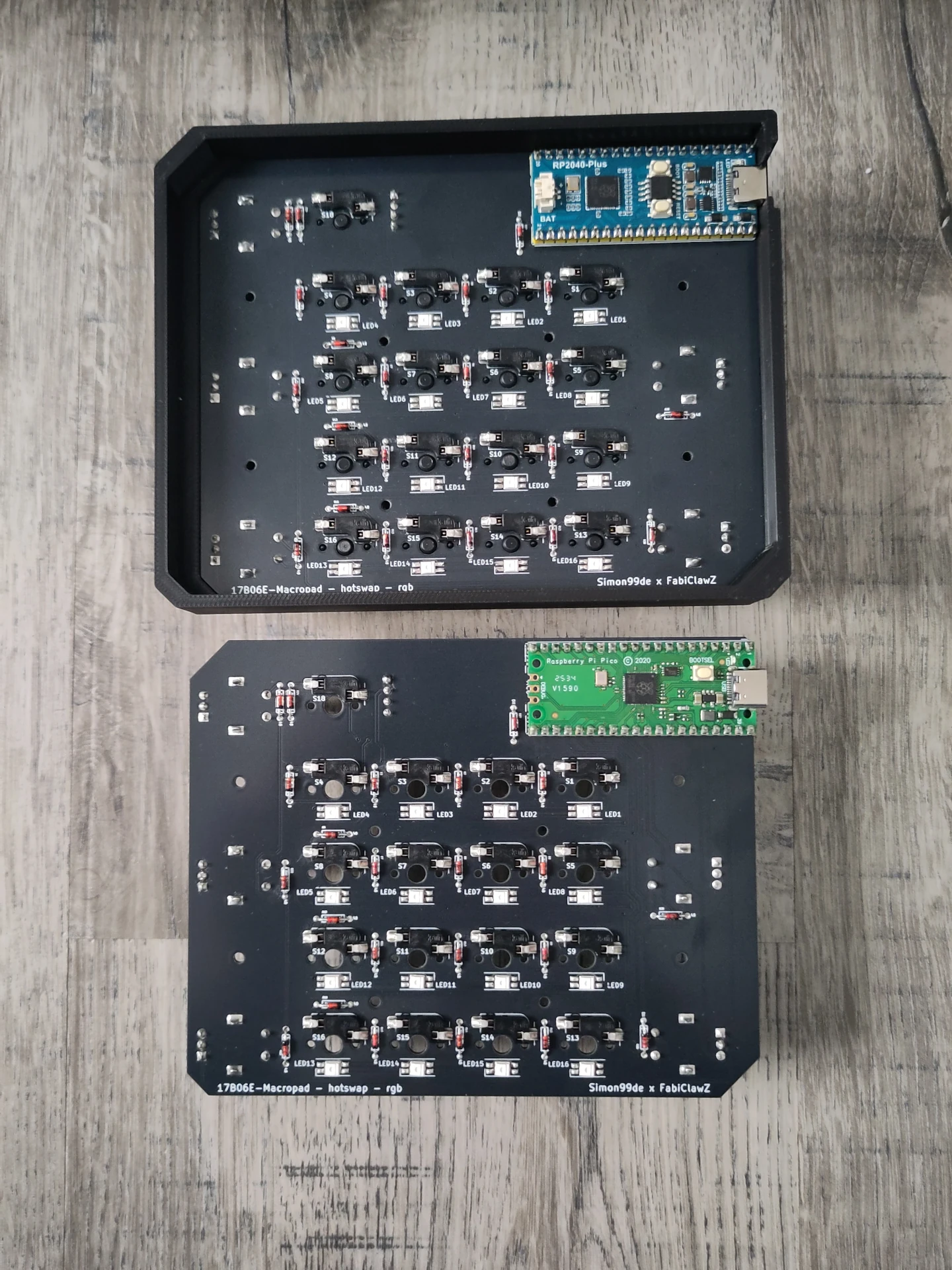
Angetrieben von QMK über Waveshare RP2040-Plus / Raspberry Pi Pico (1).
Was bedeutet 17B06E?
Ich habe den Namen 17B06E-Macropad gewählt, weil er alles beschreibt, was das Macropad zu bieten hat. 17 Buttons + 6 Encoder. Außerdem verfügt es über RGB und ein kleines OLED-Display. Mit der obersten Taste können Sie zwischen den Profilen wechseln, sodass Ihnen 16 x 4 (oder mehr/weniger) Tasten zur Verfügung stehen, wobei das aktuelle Profil auf dem Display angezeigt wird.
Quellen / Verwendete Materialien:
- Ich habe die KiCad-Vorlage von dumbpad verwendet, um dieses Projekt zu erstellen.
- Vielen Dank an den Entwickler, der die Firmware und damit das Projekt ermöglicht hat: FabiClawZ
- Remix von der Leiterplatte und das Gehäuse von Simon99de
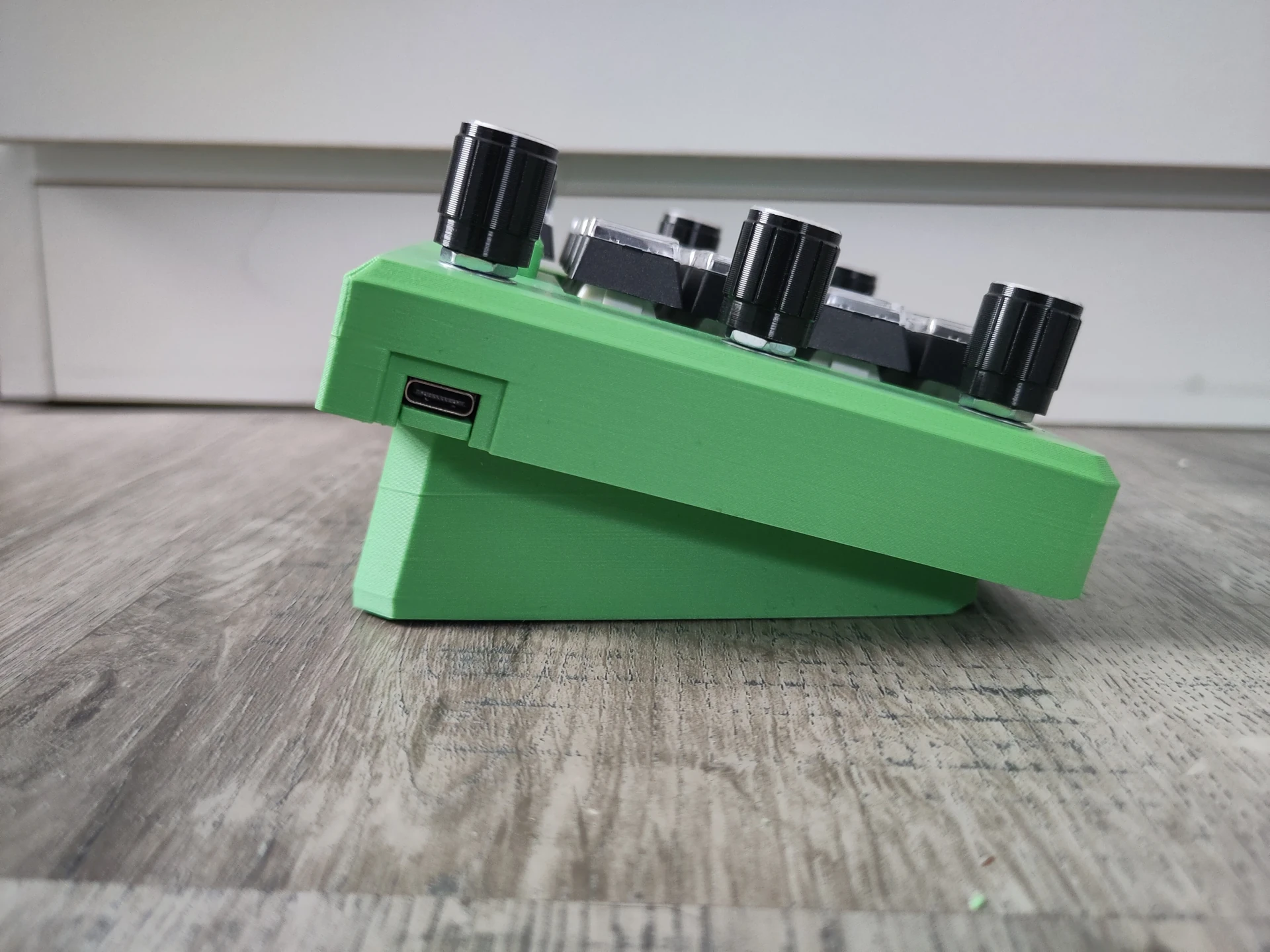
Galerie:




Erste Schritte
Um Ihr eigenes 17B06E Macropad zu bauen, müssen Sie zunächst einige Schritte befolgen. Im Folgenden werden die Mindestanforderungen beschrieben, die Sie für den Zusammenbau eines 17B06E-Macropads benötigen.
1. Version auswählen
Derzeit ist nur eine Version verfügbar. Die Firmware befindet sich im Firmware-Ordner auf github.
2. Teile Bestellen
Jede Platine benötigt mindestens die folgenden Komponenten, aber überprüfen Sie den richtigen Ordner für Ihre Teileliste.
- 1x PCB (gerber Datei)
- 17x Kailh Hotswap Sockets (rev 2)
- 17x MX-style mechanical switches
- 17x Keycaps (Ich verwende die AXYB-Tastenkappe, bei der man die Kappe abnehmen kann. Es gibt auch eine u1-Version.)
- 22x 1n4148 diodes (Durchgangsbohrung)
- 1x Waveshare RP2040-Plus, Raspberry Pi Pico oder pin-compatible MCU basiert auf RP2040
- 2x 1x20 Pin header (oder MCU, wo es vor-verlötet ist)
- 6x EC11 rotary encoder mit pushbutton (7-pin)
- (optional) 1x 0.91" 128X32 OLED Display (Bitte beachten Sie die Pinbelegung (I2C); es gibt verschiedene Varianten, und sie muss auch +5V-kompatibel sein.)
- (optional) 1x 1x4 male headers (Stecker und Buchse für das OLED-Display)
- (optional) 1x 1x4 female headers
- (optional) 16x SK6812 mini e LEDs
- (optional) 4x (Uni-Fine) Protective rubber buffer (Für den Fall, dass es nicht verrutscht. Ich habe damit gute Erfahrungen gemacht.)
- (recommended) 8x M2x12 Hexagon socket head cap screws - DIN 912 (ISO 4762) - (damit das Gehäuse zusammengeschraubt werden kann)
3. Bauen Sie Ihr 17B06E-Macropad zusammen.
Für diesen Schritt benötigen Sie mindestens einen Lötkolben und eine Pinzette.
- Löten Sie die Dioden, Hotswap-Sockel, Drehgeber (LEDs) und MCU (Pi Pico) auf die Leiterplatte.
- Schauen Sie beim Testen nicht direkt in die LEDs, da diese sehr hell sind! Sie können die LEDs auch auf der Rückseite sehen, wenn sie leuchten, allerdings nicht so hell. Verwenden Sie Tastenkappen.
Hinweise zum Löten
Es wird empfohlen, mit den Sockets zu beginnen und dann die restlichen Teile hinzuzufügen.
Die Encoder müssen vor der MCU gelötet werden!
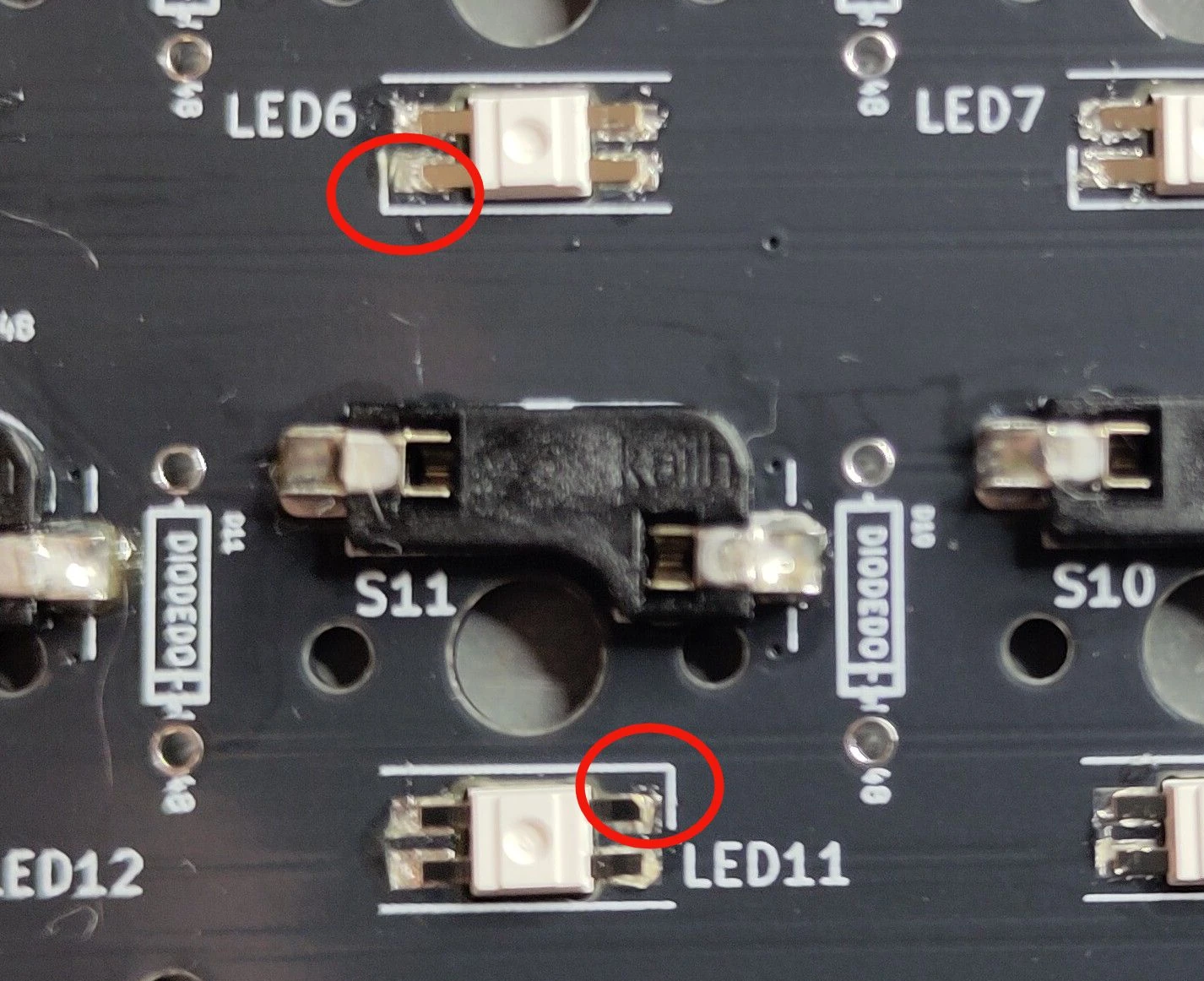
Löten Sie die SK6812-LEDs so, dass die fehlenden Ecken mit den auf der Leiterplatte aufgedruckten Ecken übereinstimmen, wie in der Abbildung gezeigt.
HINWEIS: Die Ausrichtung der LEDs ändert sich zwischen den Zeilen!
4. Flashen Sie Ihre Firmware
Enter bootloader mode:
Die Methode variiert bei anderen Boards, aber beim Pi Pico beispielsweise können Sie die BOOTSEL Taste gedrückt halten, während Sie ihn anschließen, und er sollte ebenfalls in den Bootloader wechseln. Alternativ können Sie die QK_BOOT Taste belegen und drücken, um die MCU im Bootloader neu zu starten. Standardmäßig ist diese Taste mit dem Druck auf den unteren rechten Encoder auf der zweiten Ebene belegt.
Der Controller sollte automatisch neu starten und in den Bootloader-Modus wechseln – auf Ihrem PC wird ein Flash-Laufwerk mit dem Namen RPI-RP2 angezeigt.
Firmware kopieren:
Sie können Ihre *.uf2-Datei nehmen und sie auf das gemountete Laufwerk kopieren. Es wird sich selbst un-mounten und neu starten. Wenn der Firmware-Flash-Vorgang erfolgreich war, haben Sie eine funktionierende Tastatur. Wenn nicht, wiederholen Sie bitte den Vorgang. Da der Bootloader in den ROM eingebrannt ist, kann er nicht beschädigt werden. Es ist sehr unwahrscheinlich, dass Sie etwas kaputt machen.
QMK (alternative Option):
Mit QMK können Sie Firmware für Ihr 17B06E-Macropad erstellen und flashen. Mit dem QMK-Konfigurator können Sie jede Taste konfigurieren. Gehen Sie zum QMK-Konfigurator und wählen Sie simon99de/17b06e/[norgb|rgb]. Nachdem Sie Ihr Board konfiguriert haben, klicken Sie auf „Compile“ und dann auf „Firmware“, um die Firmware herunterzuladen. Anweisungen zum Kompilieren und Hochladen finden Sie unter qmk_firmware/keyboards/simon99de/17b06e.
5. 3D gedrucktes Gehäuse
Ich habe die Dateien zum Drucken des Gehäuses auf die verschiedenen Plattformen hochgeladen. Die Dateien und die FreeCAD-Datei für Modifikationen (Mods/Zubehör) sind ebenfalls hier verfügbar.
Die Links sind noch nicht funktionsfähig, da sie sich noch in der Entwicklung befinden!
6. Tasten und Decoder anpassen
Es gibt mehrere Möglichkeiten, die Tasten zu ändern. Ich werde sie hier auflisten:
- QMK
- VIA (Website, Empfohlen)
- Vial Web (Website, Empfohlen)
- Vial Download (Download, Beta)
Sonstiges
bekannte Probleme
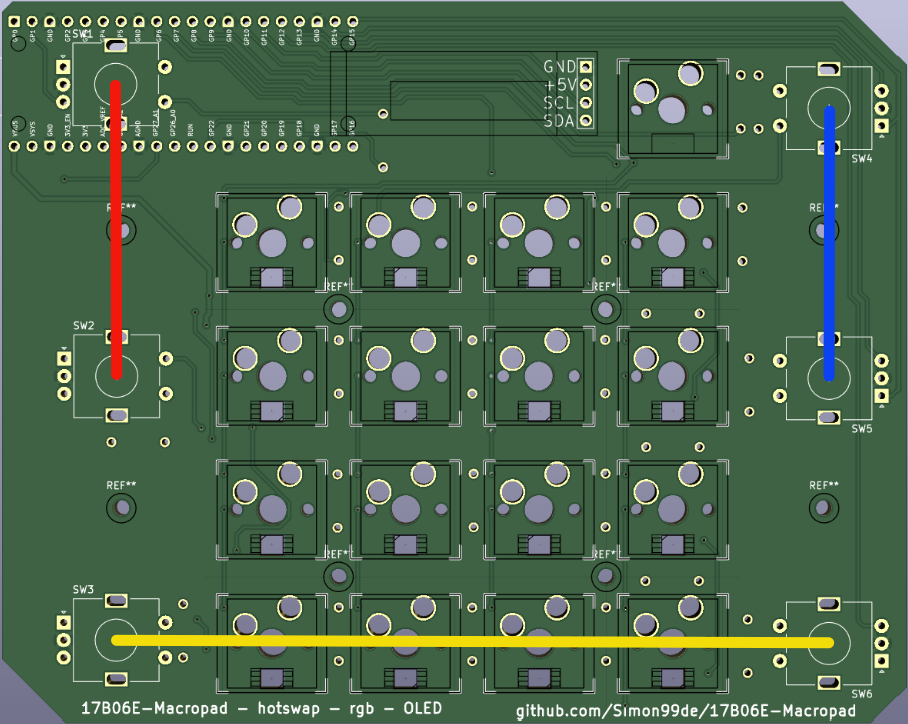
Der Drehknopf funktioniert nicht
Wenn ein Encoder keine Signale mehr ausgibt, wird der andere in der Matrix nicht auf einen Rasterpunkt geschaltet, was zu dem Problem führt. SW1 + SW2, SW4 + SW5 und SW3 + SW6 befinden sich in einer Matrix. Es gibt drei Matrizen, um Fehlausgaben zu verhindern und dennoch Pins zu sparen.
Wenn also beispielsweise der obere SW4 auf der blauen Leitung nicht funktioniert, ist der Encoder SW5 nicht richtig eingerastet.
MCU (Pico) auf Werkseinstellungen zurücksetzen
Wenn Sie das RP2040-basierte Board vollständig zurücksetzen möchten, stellt Raspberry HIER eine Datei für diesen Zweck zur Verfügung. Nach dem erneuten Einstecken des Boards wird die MCU vollständig gelöscht und alle Makros und Einstellungen werden ebenfalls gelöscht!
Danach können Sie die Firmware erneut flashen und erhalten dann die Standardeinstellungen zurück.
Fehlt hier für dich etwas oder ist etwas noch unklar? dann kontaktiere mich doch bitte unter: Kontakt